
Описание
Сейф — ящик для хранения ценностей, защищенный замочным кодом, при наборе правильной комбинации — открывается на 10 секунд.
Код сейфа в примере: 1324
Цифры считаются с верху в низ.
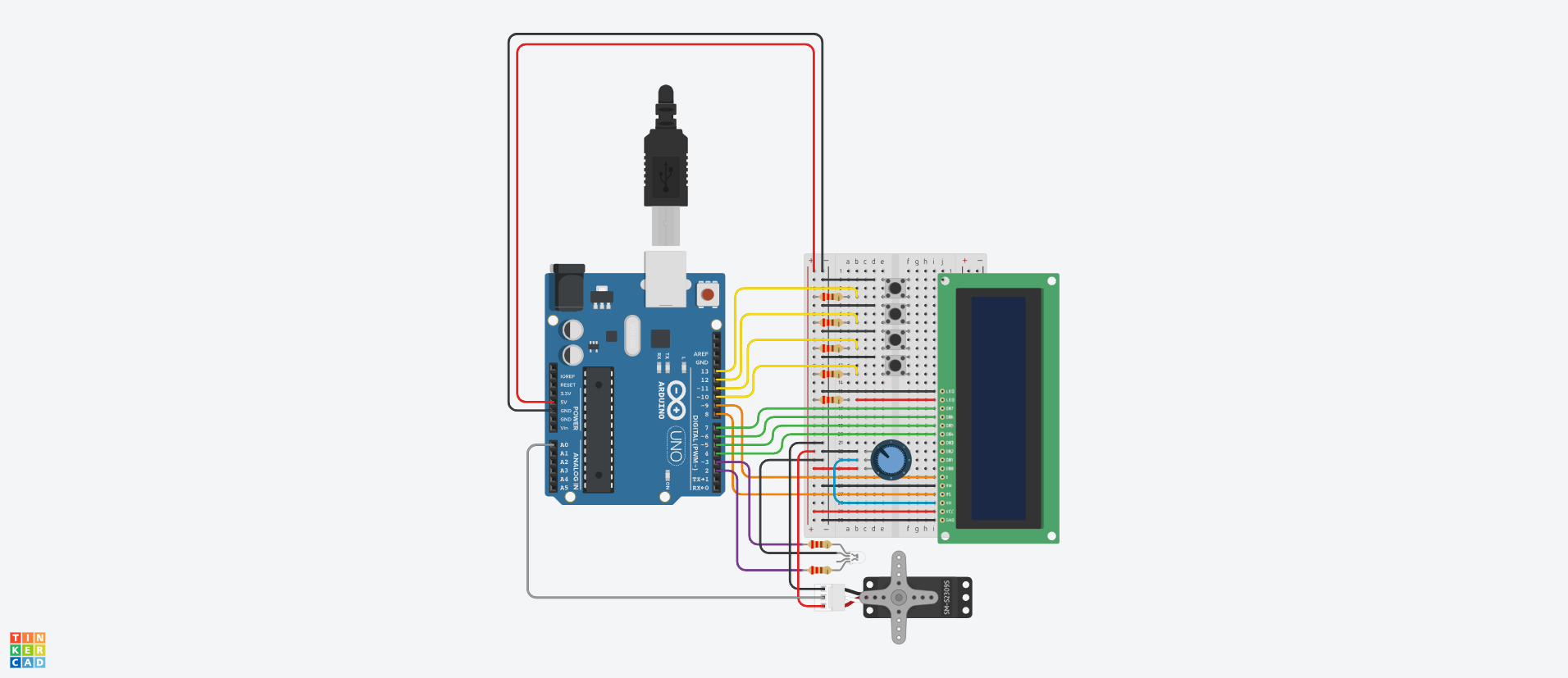
Использованые компоненты
4x кнопки
1x потенциометр
1x 1602 LCD экран
1x RGB LED
1x Servo мотор
7x 220 Ω резисторы
30x стандартные одиночные провода «папа-папа»
Код программы
#include <Servo.h>
#include <LiquidCrystal.h>
#define DEBUG
//#define DEBUG_SERVO
#define BUTTON_STATE_HANDLE(x) do { \
if (digitalRead(LOCKBOX_NUPP_ ## x) == LOW) { \
lcd.setCursor(button_counter++, 1); \
lcd.print(x); \
if (!(button_state & (1 << x)) || x == 4) { \
button_state_old = button_state; \
button_state ^= (1 << x); \
delay(100); \
} \
} \
} while (false)
const int LED_PIN_RED = 3;
const int LED_PIN_GREEN = 2;
const int LOCKBOX_NUPP_1 = 13;
const int LOCKBOX_NUPP_2 = 12;
const int LOCKBOX_NUPP_3 = 11;
const int LOCKBOX_NUPP_4 = 10;
Servo servo_;
LiquidCrystal lcd(8, 9, 4, 5, 6, 7);
int button_state = 0, button_state_old = 0, button_counter = 0;
int lockbox_state = 0;
bool lockbox_open = false;
void setup()
{
pinMode(LED_PIN_RED, OUTPUT);
pinMode(LED_PIN_GREEN, OUTPUT);
pinMode(LOCKBOX_NUPP_1, INPUT);
pinMode(LOCKBOX_NUPP_2, INPUT);
pinMode(LOCKBOX_NUPP_3, INPUT);
pinMode(LOCKBOX_NUPP_4, INPUT);
servo_.attach(A0);
lcd.begin(16, 2);
lcd.setCursor(0, 0);
lcd.print("Close");
#ifdef DEBUG
Serial.begin(9600);
#ifdef DEBUG_SERVO
delay(100);
servo_.write(180);
delay(1000);
servo_.write(90);
delay(1000);
#endif
#endif
}
void clear_states()
{
lockbox_state = button_state = button_state_old = button_counter = 0;
}
void open_lockbox()
{
digitalWrite(LED_PIN_RED, LOW);
digitalWrite(LED_PIN_GREEN, HIGH);
for (int pos = servo_.read(); pos < 180; pos += 2)
servo_.write(pos > 180 ? 180 : pos);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Open ");
delay(1000);
}
void close_lockbox()
{
digitalWrite(LED_PIN_RED, HIGH);
digitalWrite(LED_PIN_GREEN, LOW);
for (int pos = servo_.read(); pos > 90; pos -= 2)
servo_.write(pos < 90 ? 90 : pos);
lcd.setCursor(0, 0);
lcd.print("Close");
delay(1000);
}
void loop()
{
#ifdef DEBUG
Serial.println("---");
Serial.println(button_state);
delay(1000);
#endif
BUTTON_STATE_HANDLE(1);
BUTTON_STATE_HANDLE(2);
BUTTON_STATE_HANDLE(3);
BUTTON_STATE_HANDLE(4);
// kood 1324
if (button_state & 2 && button_state_old == 0 && lockbox_state == 0) {
lockbox_state++;
}
if (button_state & 4 && button_state_old == 10 && lockbox_state == 2) {
lockbox_state++;
}
if (button_state & 8 && button_state_old == 2 && lockbox_state == 1) {
lockbox_state++;
}
if (button_state & 16 && button_state_old == 14 && lockbox_state == 3) {
lockbox_state++;
}
if ((!(button_state & 16) && button_state_old & 16) || button_counter > 4) {
// 2 korda nupp 4 = reset
clear_states();
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Close");
}
if (lockbox_state >= 4) {
clear_states();
open_lockbox();
delay(10000); // Open for 10 sec
close_lockbox();
}
delay(100);
}