
Описание
Данная программа, в зависимости от температуры перемещает серводвигатель, а так же отображает информацию на LCD экране.
30 градусов и выше, переводят сервопривод в положение 180 градусов, и отображается грустный смайлик.
Всё что ниже 30 градусов переместит сервопривод на 0 градусов (в изначальное положение) и отобразит радостный смайлик.
Движения сервопривода максимально плавные!!!
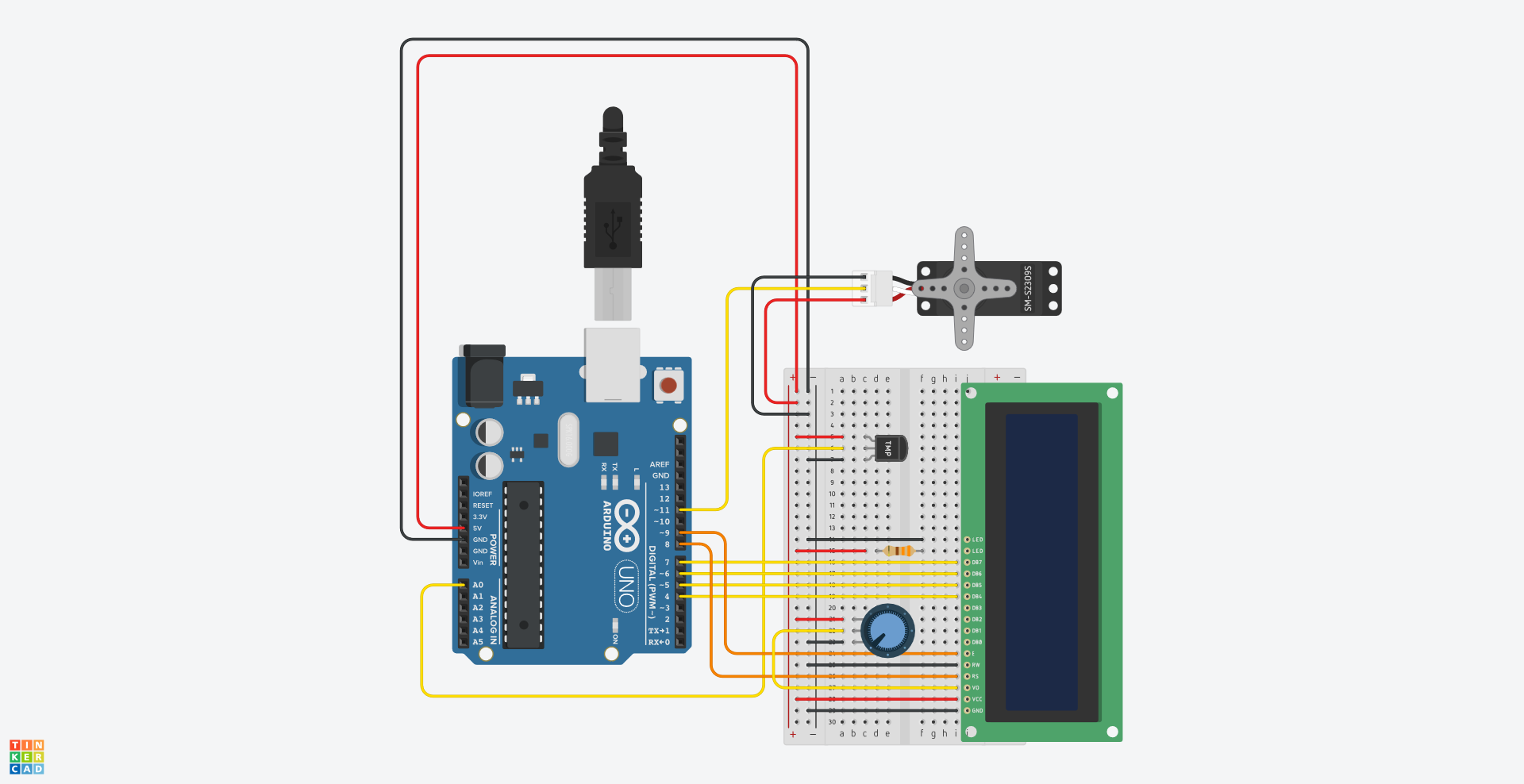
Использованые компоненты
1x 1602 LCD экран
1x потенциометр
22x стандартные одиночные провода «папа-папа»
1x 330 Ω резистор
1x термодатчик
1x Servo мотор
Код программы
#include <Servo.h>
#include <LiquidCrystal.h>
#define DEBUG
const int TEMP_PIN = 0;
Servo servo_;
LiquidCrystal lcd(8, 9, 4, 5, 6, 7);
byte gradChar[8] = { 0b00110, 0b01001, 0b01001, 0b00110, 0b00000, 0b00000, 0b00000, 0b00000 };
byte sm_eye_1[8] = { 0b00000, 0b00000, 0b00000, 0b00011, 0b00011, 0b00000, 0b00000, 0b00000 };
byte sm_eye_2[8] = { 0b00000, 0b00000, 0b00000, 0b11000, 0b11000, 0b00000, 0b00000, 0b00000 };
byte sm_positive_1[8] = { 0b01111, 0b00011, 0b00000, 0b00000, 0b00000, 0b00000, 0b00000, 0b00000 };
byte sm_positive_2[8] = { 0b00000, 0b00000, 0b11111, 0b00000, 0b00000, 0b00000, 0b00000, 0b00000 };
byte sm_positive_3[8] = { 0b11110, 0b11000, 0b00000, 0b00000, 0b00000, 0b00000, 0b00000, 0b00000 };
byte sm_negative_1[8] = { 0b00000, 0b00011, 0b01111, 0b00000, 0b00000, 0b00000, 0b00000, 0b00000 };
byte sm_negative_2[8] = { 0b11111, 0b00000, 0b00000, 0b00000, 0b00000, 0b00000, 0b00000, 0b00000 };
byte sm_negative_3[8] = { 0b00000, 0b11000, 0b11110, 0b00000, 0b00000, 0b00000, 0b00000, 0b00000 };
void print_degrees_lcd(float temp)
{
//char* str_f;
//snprintf(str_f, sizeof(str_f), "Temp: %i%c%c", temp, (char*)gradChar, 'C');
//lcd.print(str_f);
//lcd.printf ??
//lcd.clear();
lcd.setCursor(3, 0);
lcd.print("T: ");
lcd.print(temp);
lcd.write(byte(0));
lcd.print("C ");
if (temp < 24) {
lcd.createChar(3, sm_positive_1);
lcd.createChar(4, sm_positive_2);
lcd.createChar(5, sm_positive_3);
} else if (temp >= 25) {
lcd.createChar(3, sm_negative_1);
lcd.createChar(4, sm_negative_2);
lcd.createChar(5, sm_negative_3);
}
lcd.setCursor(0, 0);
lcd.write(byte(1));
lcd.setCursor(2, 0);
lcd.write(byte(2));
lcd.setCursor(0, 1);
lcd.write(byte(3));
lcd.write(byte(4));
lcd.write(byte(5));
}
void move_servo(float temp)
{
int cur_pos = servo_.read();
// 24 kraadi viib servo asendisse 0
// 25 kraadi viib servo asendisse 180
if (temp < 24) {
for (int pos = cur_pos; pos > 0; pos -= 2)
servo_.write(pos < 0 ? 0 : pos);
} else if (temp >= 25) {
for (int pos = cur_pos; pos < 180; pos += 2)
servo_.write(pos > 180 ? 180 : pos);
}
delay(1000);
}
float getVoltage(int pin)
{
return (analogRead(pin) * 0.004882814f);
}
void setup()
{
servo_.attach(11);
lcd.begin(16, 2);
lcd.createChar(0, gradChar);
lcd.createChar(1, sm_eye_1);
lcd.createChar(2, sm_eye_2);
#ifdef DEBUG
Serial.begin(9600);
#endif
delay(100);
servo_.write(90);
delay(1000);
servo_.write(0);
delay(1000);
}
void loop()
{
float voltage = getVoltage(TEMP_PIN);
float temp = (voltage - 0.5f) * 100.0f;
#ifdef DEBUG
float temp_F = temp * (9.0f / 5.0f) + 32.0f;
Serial.print("voltage: ");
Serial.print(voltage);
Serial.print(" deg C: ");
Serial.print(temp);
Serial.print(" deg F: ");
Serial.println(temp_F);
#endif
print_degrees_lcd(temp);
move_servo(temp);
}
Видеоотчет